
ROSロボットプラットフォーム
ヒット数: 56
キーワード: ROSロボットプラットフォーム / オープンソースのロボットプラットフォーム / ROSロボットキット
製品の5つの利点
製品の5つの利点
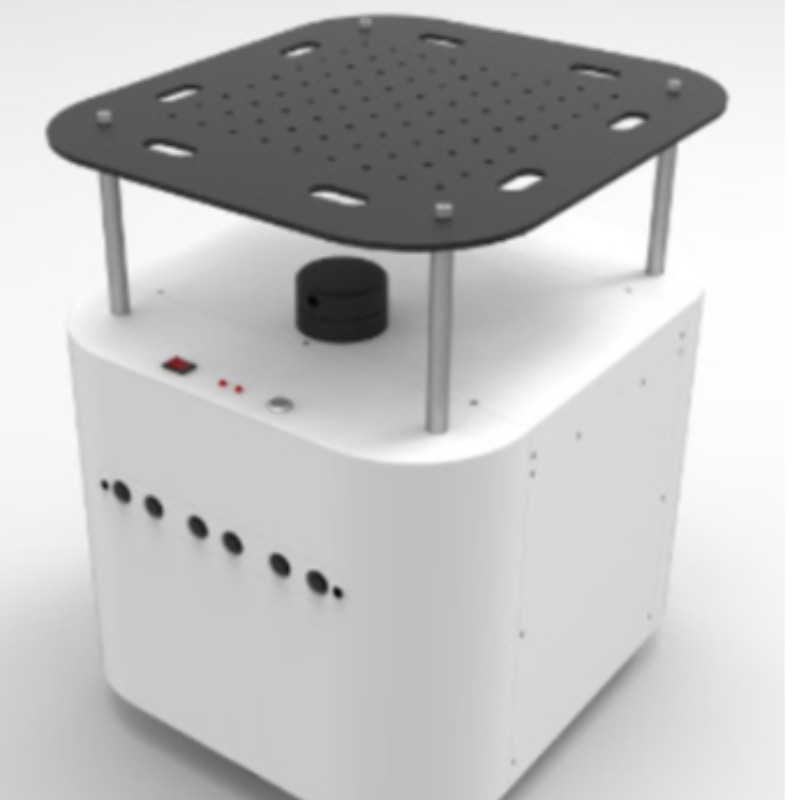
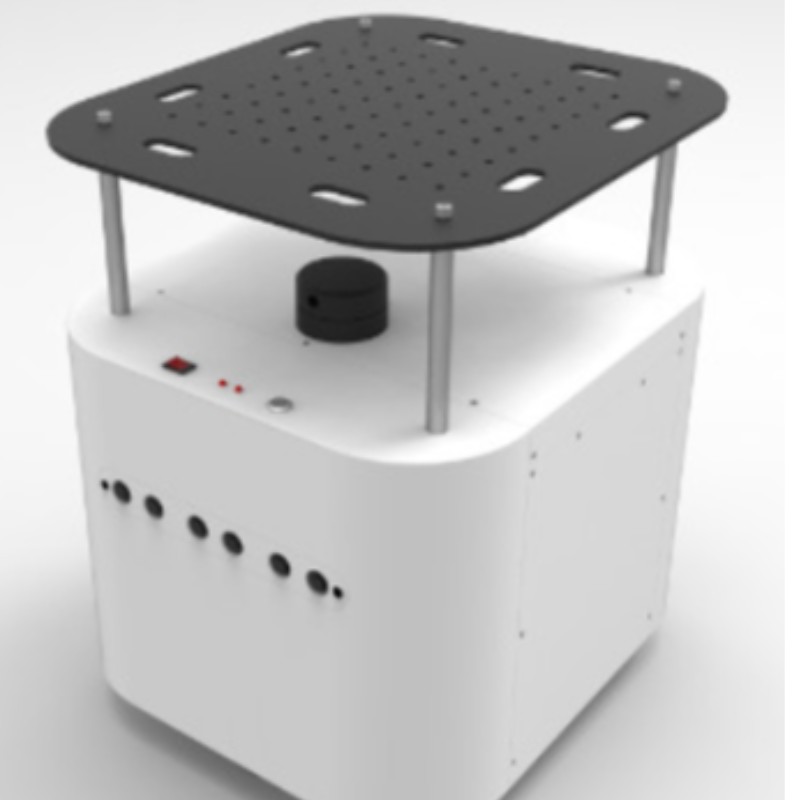
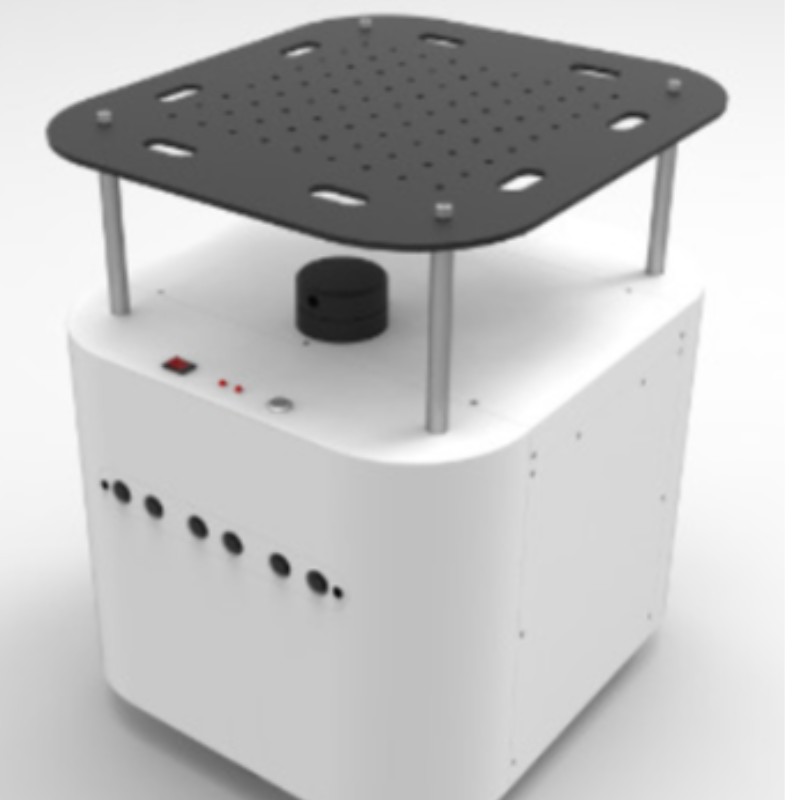
- YZ-01 ROSロボットプラットフォームは、ROSアーキテクチャに基づく2輪差動および大荷重ロボットモーションシャーシプラットフォームです。 ROSのロボット愛好家、大学生、中小企業の研究開発エンジニアの使用に非常に適しています。
- シャーシプラットフォームは、高効率と高負荷を備えた統合ハブモーターです。プラットフォームは最大50KGをロードでき、最大歩行速度は毎秒1メートルに達します。 YZ-01の内蔵DCDC電力変換モジュールは、5V、12V、19V、および24Vの4つの異なる電圧を提供できます。これにより、ロボットの持ち運びが必要なコンピューターマザーボードおよびさまざまなセンサーの大部分の電源問題を基本的に解決できます。
- 開発者が綿密な調査を行えるように、ROSプラットフォームにはIntel Core-i5産業用PCが組み込まれ、UBUNTU 16.04 O \/ S + ROS Kineticパッケージがインストールされています。同時に、他のROSプラットフォームロボットと同様に、ROSロボットYZ-01Aは、オープンソースの基本的なROSアプリケーションの例と、開発者が非常に簡単に使用できる基本的なモーションドリブンノードプログラムを提供します。
- ROS通信RS232、USB
- 自動充電ガイドLIDAR +赤外線センサー
製品詳細
製品詳細
RoSロボットプラットフォームYZ - 01 A仕様
yz‐01 rosロボットプラットフォームは,rosアーキテクチャに基づく二輪差動大荷重ロボットシャシプラットフォームである。ロズロボット愛好家、大学生と中小企業の使用に非常に適しています
&
エンジニア.
シャシプラットホームは、高効率で高負荷の統合ハブモーターです。プラットフォームは、最大50 kgまでロードすることができ、最大の歩行速度は1メートルあたり1メートルに達することができます。YZ - 01 & CountのDCDC電力変換モジュールは5 V、12 V、19 Vと24 Vの4つの異なる電圧を提供することができます。そして、それは基本的にコンピュータマザーボードの大部分の電源問題とロボットが運ぶ必要があるいろいろなセンサーを解決することができます。
Developer Development Development Developer Development Development for Deep Research、ROSプラットフォームは、インテルCore - i 5の産業用PCを構築し、Ubuntu 16.04 O / S + ROSの動的パッケージを構築しました。同時に、他のRoSプラットフォームロボットのように、RoSロボットYZ - 01 Aは開発者が非常に簡単にそれを使用できるようにオープンソースの基本的なROSアプリケーションの例と基本的なモーション駆動のノードプログラムを提供します。
問い合わせ
2026 Shenzhen ABT Electronics CO.,LTD 全著作権所有。